After having almost completely mounted the Sim in a newly built wooden house including a curved 210 degree screen and three projectors, a small metal part of the mechanical rudder pedals broke. Since the B737 sim is mounted in a real cockpit enclosure, there is no way to access the rudder pedal from the front. This meant unmounting the pedestal, throttle quadrant, seats and the main instrument panel MIP first …
The good thing about such an exercise: each time I have to take apart the Cockpit things can be improved and the rebuilding process becomes easier. The broken part was found, but the supplier of this otherwise great dual linked rudder pedal assembly, SimuJabs from Spain, unfortunately went out of business.
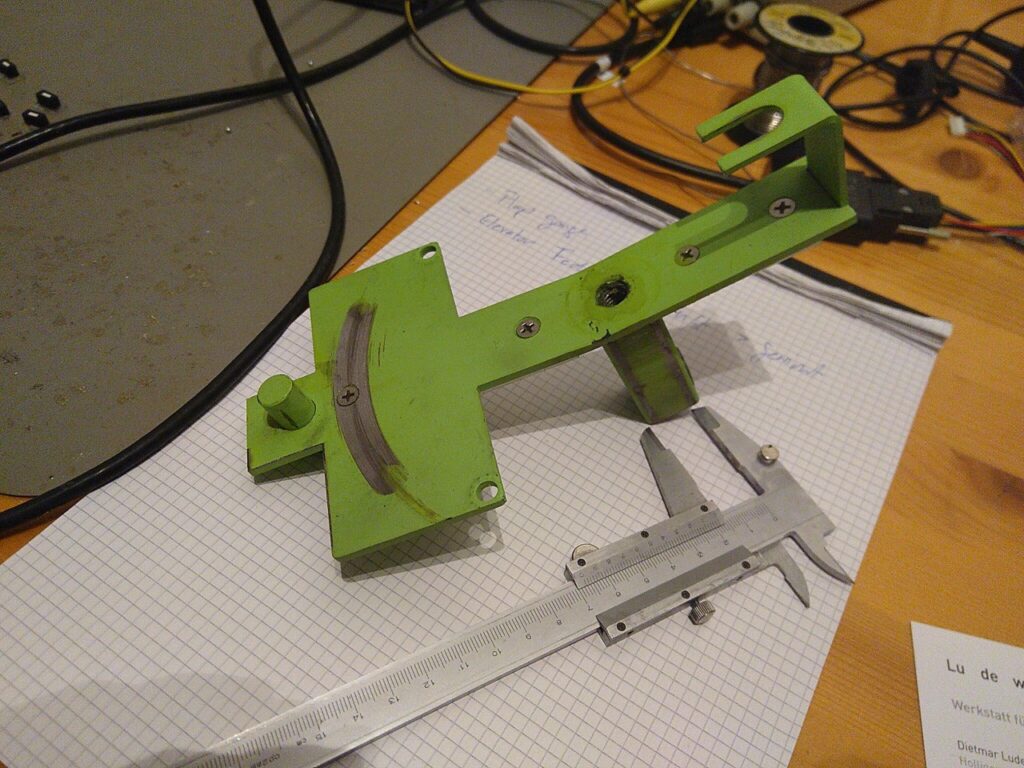
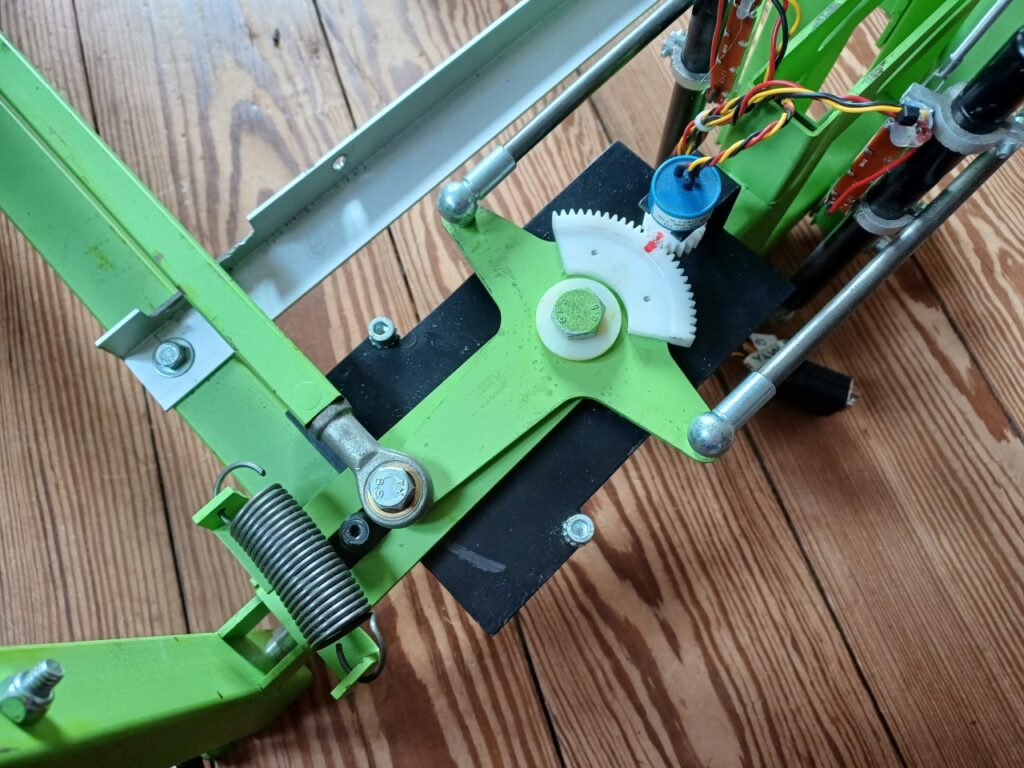
I was very glad to find a nearby wood and metal workshop in 3008 Bern called LU DE WIG, who created a reinforced replica of the broken part in s short time (piece is now painted in black instead of green):
Rebuilding the cockpit (start in front and work your way backwards was a breeze (only around five hours in total):
The whole thing has actually started in 2007 at my bachelor’s party with friends when we buried three rather expensive bottles for 10 years about 1 m deep in a forest in central Switzerland. Guess what: the wine has aged perfectly under really adverse conditions since the bottles were subject to seasonal temperature changes of 10 degrees Celsius or more and were experiencing changes in soil humidity from completely dry to soaked in ground water.
So: What about those who say that wine can only be preserved with constant climatic conditions?
There have been several instances during the last years where either I or a colleague did bury a fine bottle of wine, geo-tagged the site and motivated others to find it. Preferrably on Elba Island. The idea ha ripened for building a geocaching initiative where you can find “wine caches” buried underground. The idea would be that you could get a nice outdoor experience and have a good drink with wine you would have never bought yourself. The rules for such a game would need to be created. The main rule would be that you have to re-dig a wine of your choice once you have emptied a cache. The main problem with this game is that current geo-caching initiatives do not (geocaching.com or opencaching.de) do not allow to hide alcoholic beverages since they are open for everybody. The project “winedigger” (let’s call it this way for the moment, there is no such website to date) would therefore have to be an adults-only (18+ year old) game.
Please get back to me if you would want to take the initiative and start the project.
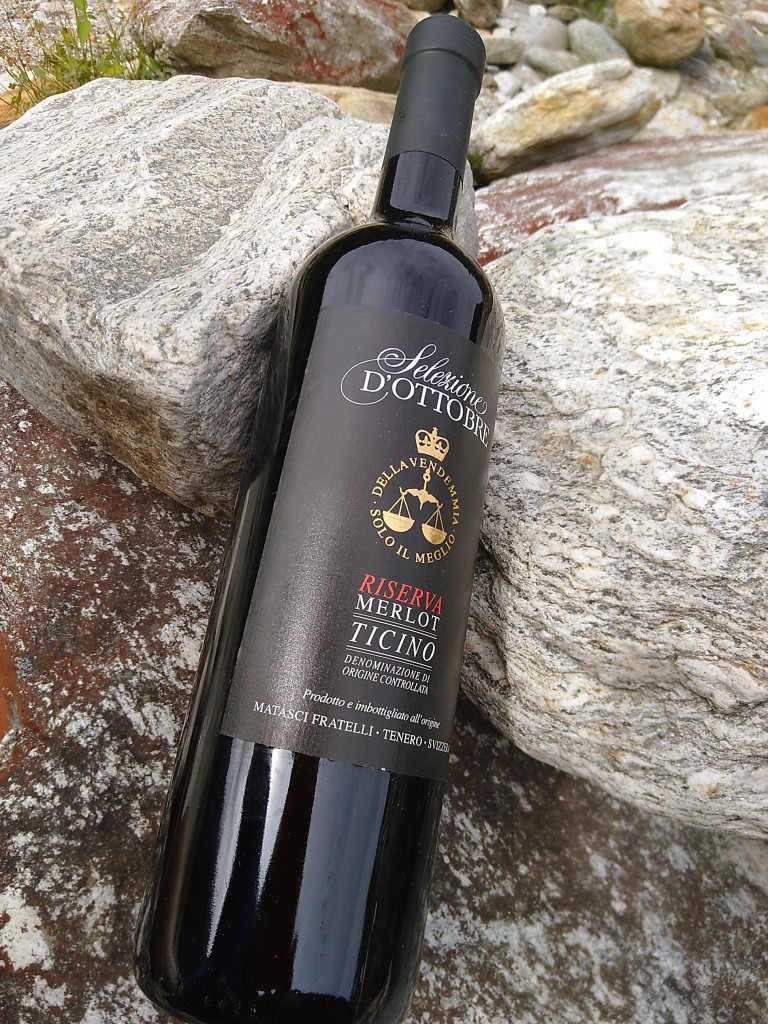
Wine-Cache No. 1: Verzasca Valley Switzerland
Located in the beautiful Verzasca Valley in southern Switzerland, this typical (but not most expensive) Merlot grape wine was buried by me on 8 August 2023.
46.346050 °N, 8.791470 °E 897 m.asl. (Precision: 3-5 m)
Here are some pictures for you to guess what to expect. Note that the bottle is located in around 70-80 cm depth and you may have trouble to get to the place in spring during snow melt and after heavy showers. You need a shovel to dig since you may be off by 1-2 m.
In case you get lost, here follow two pictures of larger stone formations in the vicinity. Actually, the bottle is located just in the middle of those two stone formations …
Wine-Cache No. 2: Elba Island, Italy
If you ever visit Elba, don’t miss out the southern part of Lacona. It offers fine food, beaches without big buildings in your back and … a wine cache. Also don’t miss out the restaurant Bagni Orano. You can enjoy fine fish dishes while massaging your feet in the sand.
42.7597033 °N, 10.3072417 °E 2 m.asl. (Precision: 1.5 m)
We also have included a few kid’s toys. But be aware: the cache is burried around 1 m deep in the sand. You will need a good shovel (an avalanche shovel is a helpful tool for sand digging) and you may need to get rid of daytime spectators before digging. Sunset or sunrise is a good time for wine cache digging. If you need a hint: the sixt pole to the right, starting from the surveillance tower, shall it be and not more than 9 regular steps you shall walk towards the sea.
Update: there is a new bottle burried as of 2 October 2025. The old one was possibly found and not replaced by the finder.
Wine-Cache No. 3: Pfynwald Wallis in Switzerland
The Salgesch Village in the Canton Wallis in Switzerland is known for its superb wines. If you ever happen to be there, please don’t miss out the Gregor Kuonen Wine Cellar for tasting a few of the finest wines of southern Switzerland. A few km south of Salgesch on the southern side of the Rhone river lies the Pfynwald nature reserve. I have burried a fine bottle of Gregor Kuonen red wine for you. Notably not in the nature reserve itself but in a agriculturally used grazing field just at the border to the forest. Depth is only around 20 cm. Have fun!
46.298690 °N, 7.583840 °E 560 m.asl. (Precision: 3-5 m)
Good luck with finding! And please let me know if you have replaced it with a bottle of your choice. And even more importantly, please leave me a note on the wine tasting ceremony!
I wanted to rotate the cockpit shell horizontally by 90 degrees (you may have read the article where we already had rotated it by 90 degrees vertically). The thing weighs around 600 kg and wheels are not an option when rotating in a circle.
The idea was: build skis of wooden plates and use frying butter to lubricate and get around static friction of the wood plates. I had no idea if it would work. This was simply a cheap try. The expensive solution would have been to rent a crane (been there done that, see here).
Fortunately it worked out thanks to the help of my neighbors (no names here in this public blog, but many many thanks again for their force and help!). Using frying butter it rotated with medium force needed … like on butter!
Take 1 (Turning)
Take 2 (Moving)
And … in order to build a house around the cockpit to fit the projectors and screens in a waterproof environment, the whole cockpit was moved away from the platform today … many thanks to the whole family for helping!
The journey has just begun, or as we say in german: Der Weg ist das Ziel. After adapting the nicely made upper part of the Boeing 737-800 MIP from SISMO Soluciones to the original Boeing 737-300 MIP stand below (see this post), the next task was to outfit the whole thing with proper electronics.
I have started with the MIP LCD displays and the FMC’s. Most cockpit builders use regular monitors and connect them to multiple regular PC’s. There are two uncessary parts in such a setup:
Monitor Case: There is no need for it as the monitors sit behind the MIP case anyway. The original monitor case further creates an artificial distance between the MIP glass and the monitor itself. It would be good to have the displayed content as close to the front of the MIP itself to avoid shading effects when viewed from the side.
One PC per Flight Display: There is no need for so many PC’s since the flight displays require a minimum amount of CPU/GPU power. They do not display 3D content. They however need to react in real time to the simulated contect. A delay of 100 milliseconds between aircraft movement and the reaction of the artificial horizon would be very hard to fly. So a 25-50 frames-per-second update frequency of the primary flight display and a maximum of 10-20 millisecond delay would be a good target.
The solution was to buy monitor screens and HDMI driver boards instead of the full monitor. With the variety of sellers on Ali Express this becomes rather simple. I’ve chosen the following models:
Captain and First Officer CDU: 1920×1080 18.5″ G185HAN01 and the HDMI driver board M.NT68676
EICAS CDU: 1680×1050 15.4″ LP154WE3-TLB2 and the HDMI driver board M.NT68676 (please select correct display model for its firmware and cables to match)
For each of those displays I’ve selected a Rasperry PI (3B for FMC or 4B for the CDU’s) which runs XPOpenGC. First tests showed a very good performance within above specs. Rasperry PI’s use little power, are cheap, can be administered remotely and can be easily stowed in the center part of the MIP base.
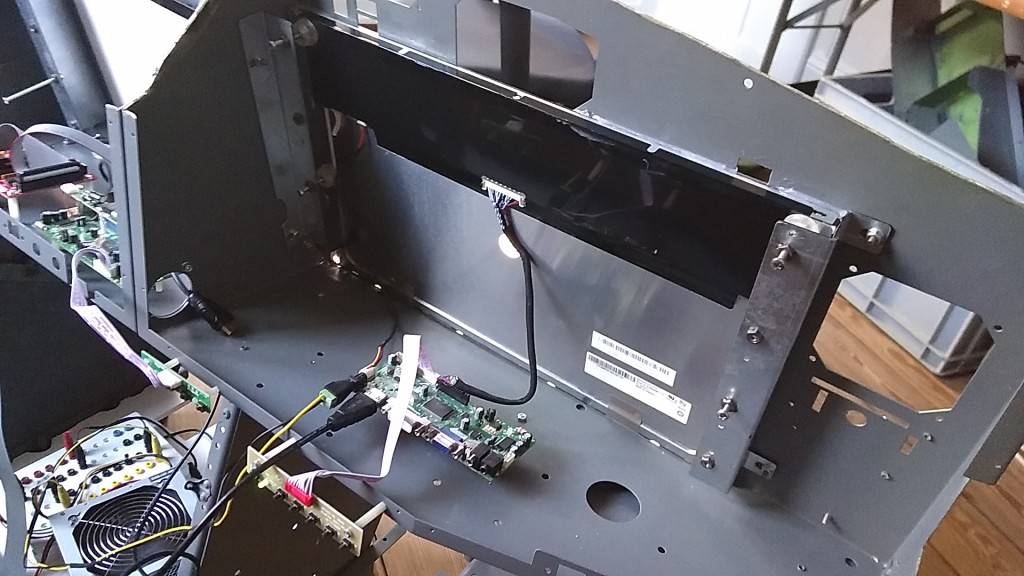
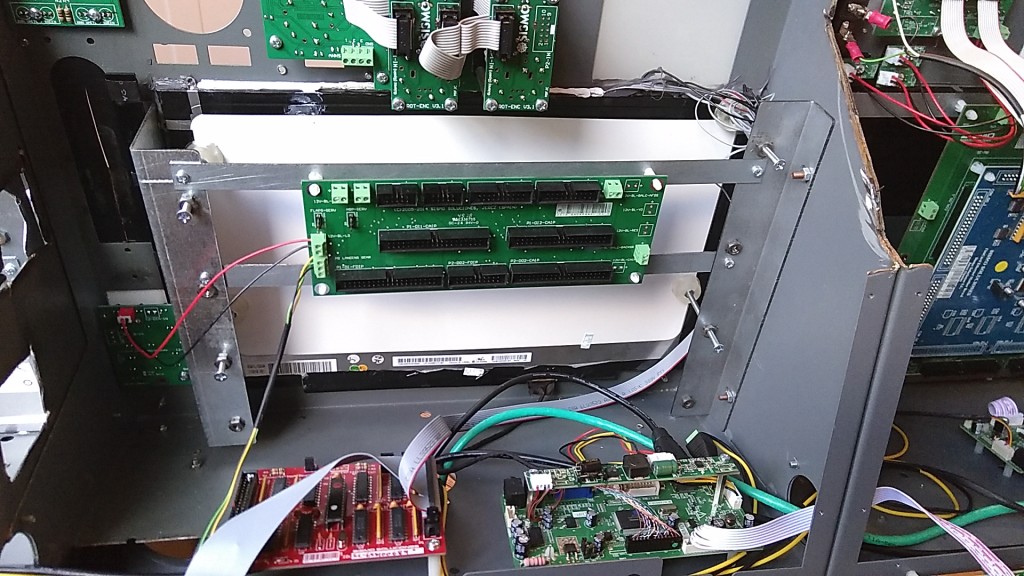
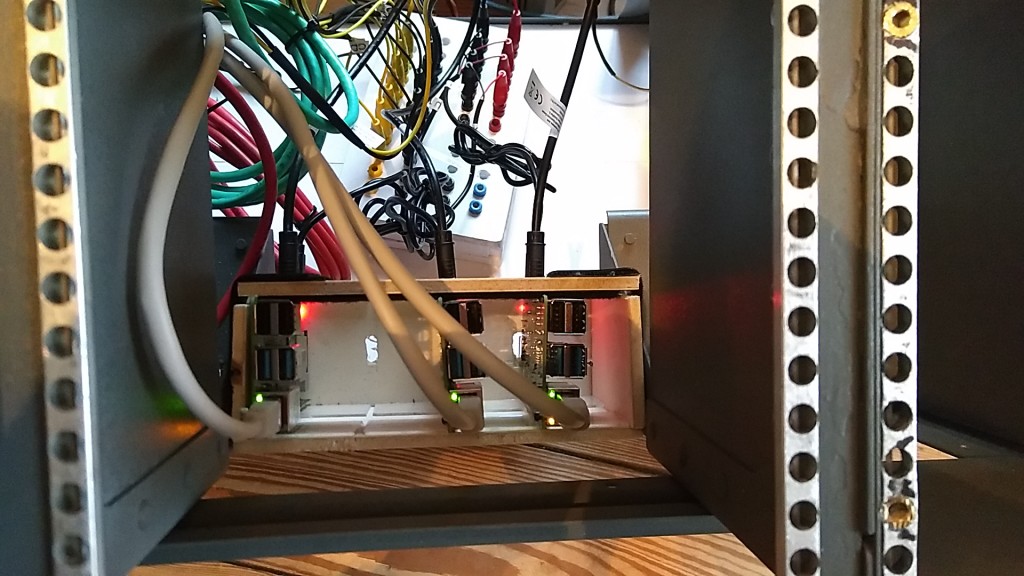
You may find the following images helpful in case you build your own cockpit:
The Captain Side CDU: the monitor nicely fits close to the MIP case. You can also see the HDMI driver board and the monitor control buttons, which I have put to the back of the MIP, just in case I need them during operation.First Officer side CDU. Same Procedure.EICAS CDU was a bit more difficult. Due to the size and lightness of the monitor, it is a laptop screen, It needs to be handled with care. I also glued the top and left hand side in order to avoid stray light entry, especially from the gear annunciator and the EDC above. You also see the ISFD wires which had to fit the monitor mount.The quality of the Full HD MIP displays is quite astonishing. You also see a fully functional WXR display.Here you see all three monitors and one FMC in operation. The second FMC will be built once the MIP has proven to be free of bugs.The three Rasperry PI 4B minicomputers in the center lower CDU bay. The lower CDU will possibly never be built since the B737-300 does not have space for it.
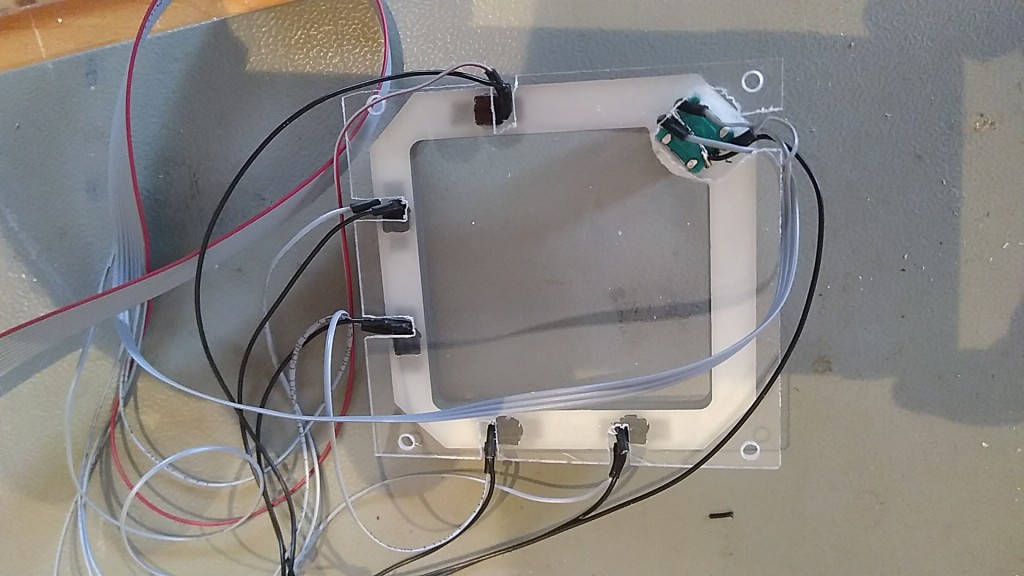
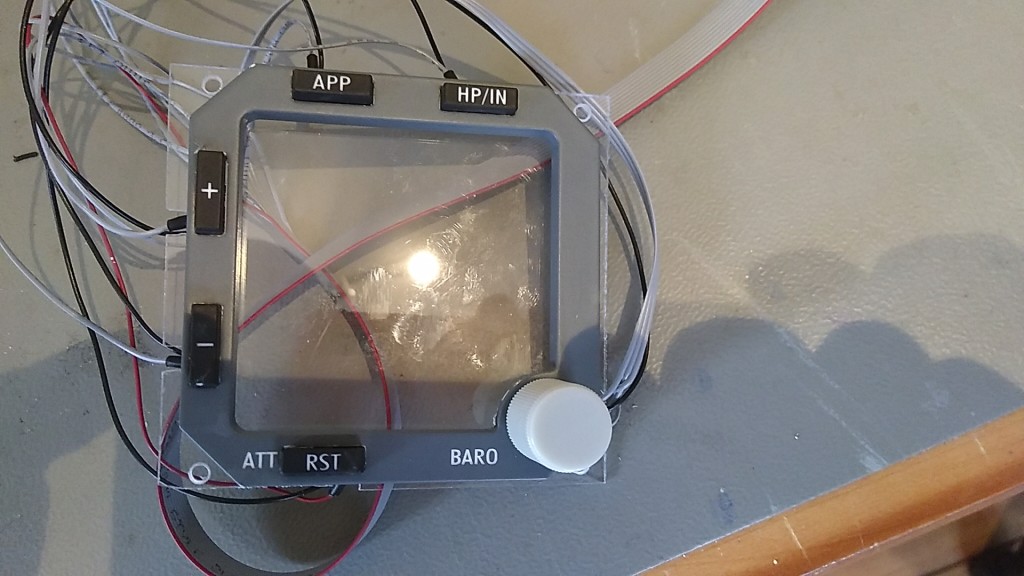
The Integrated Standby Flight Display (ISFD) is used in all newer Boeing 737 jets. This instrument is thought to be a backup when all other (now digital) flight instruments fail. In the real aircraft it is a fully independent (in terms of power and sensors) and rather small replacement of the Primary Flight Display (PFD) with reduced amount of information. It will tell you altitude, attitude, bank, speed and heading. What do you need more? In the simulator, we can mimik its usefulness by e.g. turning off the PFD and keeping the ISFD on, simulating broken avionics. The ISFD has five buttons and a rotary encoder to set e.g. the barometric height, since its pressure is measured separately for the ISFD.
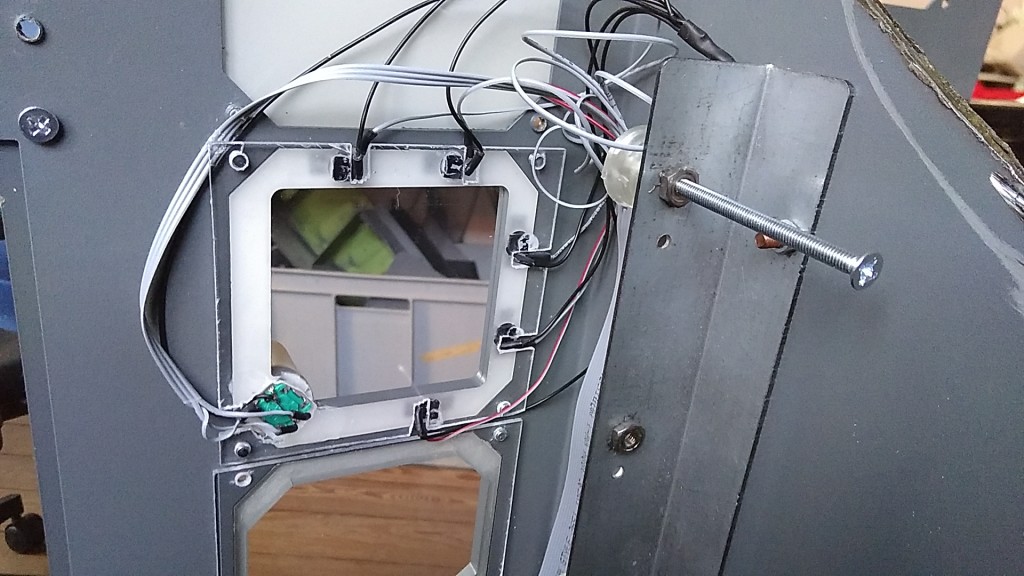
SISMO Soluciones sells a very authentic “dummy” bezel of the ISFD for a good deal. However, as the description says, the buttons are just decorative. I have removed the button caps and have mounted real buttons behind those caps and a rotary encoder into the dummy bezel. Apart from destroying a few edges of the nicely painted ISFD bezel, the thing looks pretty nice and also works. The key is to use as little space behind the bezel for wiring and screws, since the EICAS monitor will have to fit closely to the plexiglas of the ISFD bezel. Oh, one note: the original plexiglas of SISMO Soluciones is a smoke glas, which looks nicely, but unfortunately “eats” too much of the monitor brightness. The solution was to simply cut my own transparent plexiglas. For those of you who would like to repeat my work, please be aware to buy an additional inputs daugther card and connect it to the SISMO Soluciones master card via the 10 pin downstream link since the ISFD needs a total of 8 inputs (5 buttons, 2 for the encoder and if you want, one for the encoder button).
In case you look for a low height rotary encoder that would fit your ISFD. I can recommend the ALPS EC11E18244A5, as for instance sold by Farnell.
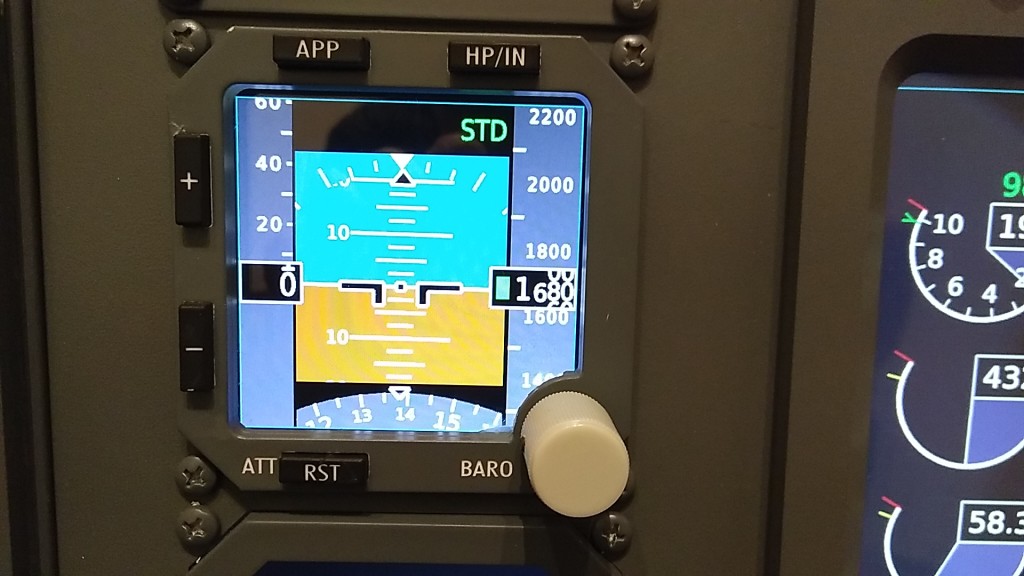
Now have a look at the process and the result and compare to the original above …
I have wiped the Fairphone OS (a standard Android) of my 4 year old Fairphone 2 and replaced it with the Lineage OS 18 without any google play and google play services. The problem with this solution is that you have to search your apps by hand and many of the apps still depend on google play services even if you find their binary (APK) to sideload. It is a pity that our world is so much linked to the privacy-neglecting services of Google and Apple these days.
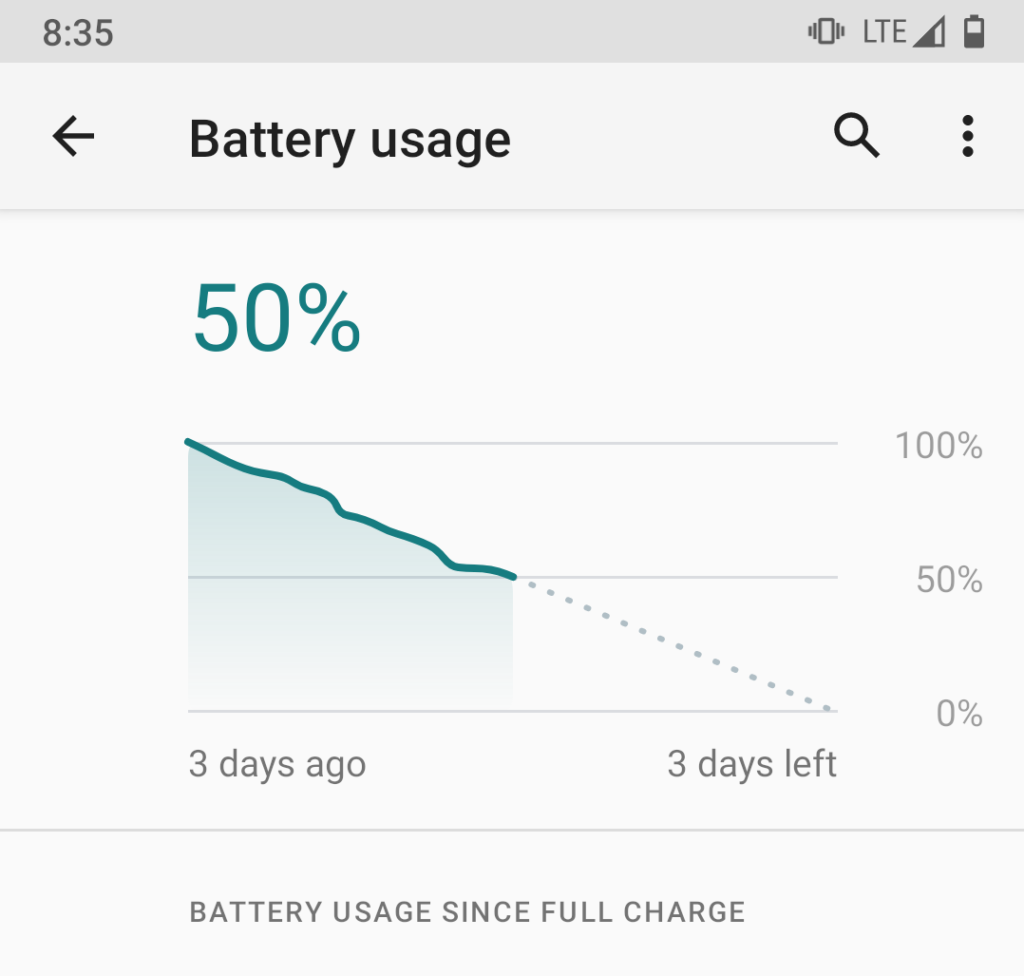
The upside of choosing an open source variant of Android like Lineage OS. totally ignoring Google: my battery life went up from 3-4 days to 5-6 days again, like in the old times.
What does this mean to me: the constant data exchange of my old Fairphone through Google Play and Apps that sent usage data to Google permanently sucked 10-30% of my smart phone battery! I cannot explain it otherwise.
To be honest, I have a larger personal conflict between my professional engagement as climate change scientist, my private engagement on low fossil fuel usage on one side and my unbroken enthusiasm for aviation on the other side. I try to solve it by not owning a car, using things for a long time, repairing things five times and doing rather local vacation with my family.
From time to time, however, it would be cool to fly … not just in the home built simulator. Apart from the uncool carbon emissions, air travel has become non-enjoyable for most, especially with larger airports, security measures, waiting times and with a decreased uniqueness of the event of flying. Unless you upgrade for many bucks, but the increase in service still puts you and 360 others in a big metal canister after all the waiting time in the big airport. And I have never tried (and not even thought about trying) low cost airlines. The whole Corona thing has made me think about quality versus quantity when it comes to air travel.
So I thought about a possible solution and tried it out with my family. Lets revert back from mass transport with mass carbon emissions to personalized air travel and an adequate price tag. Price usually regulates demand and scale very well. A fair price includes service, uniqueness, fair salaries to pilots and maintenance staff and short boarding times. With a fair price for air travel the cost of offsetting carbon emissions is not of relevance any more (so carbon offset tax could even be much higher than it is). Which of course means that for a family of 5 like we are, such a personalized adventure will financially only be doable every 5-10 years … and possibly a long haul flight with such a service will not feasible for us at all. Which is good!
The opportunity was given by the charter flights offered this year by Belpmoos Reisen AG between Bern and Elba by contracting with Swiss Flight Services and using their King Air 350i aircraft with 8 passenger seats. They however did not offer flights at the date when we wanted to book the service. Thankfully they extended their schedule and we reserved 5 seats for the flight from Elba to Bern. They eventually found 3 more people to fill the aircraft. We went to Elba the classical way by train and ferry (well, the really classical way is by car, which is what 99.95% of all tourists do) and had a wonderful post-Corona holiday on the beach village Lacona.
And the adventure to go back from the small airport of Marina di Campo to Bern was really a great one with beautiful weather and very friendly staff of Swiss Flight Services. I wouldn’t want to miss it. It passed rather quickly but it was the opposite of the typical sardine box feeling of modern air travel.
Kids had the most fun with the kind of fancy electrically controllable polarized window shades which went from transparent to opaque and even blueish.
I have bought the high quality MIP with glareshield from SISMO Soluciones and wanted to put it on top of the original B737-300 MIP stand and then mount both things into the real B737-300 cockpit shell. Nice idea.
Of course the MIP stand totally changed from the -300 to the -800 (the FMC&lowerCDU bay is much wider now). And the really neatly build MIP from SISMO Solutiones would never fit into the really tight space of a real cockpit.
Also, and challenging everyone who argues that Boeing never changes a running system, the gear lever mechanics shifted by around 4 cm to the left in NG models.
By help of the circular disc saw and many hours of work later I can say that all those things are finally compatible and fit together. I also make sure that I can remove the MIP independently from the stand and independently from the glareshield/mcp in order to service parts once it is mounted.
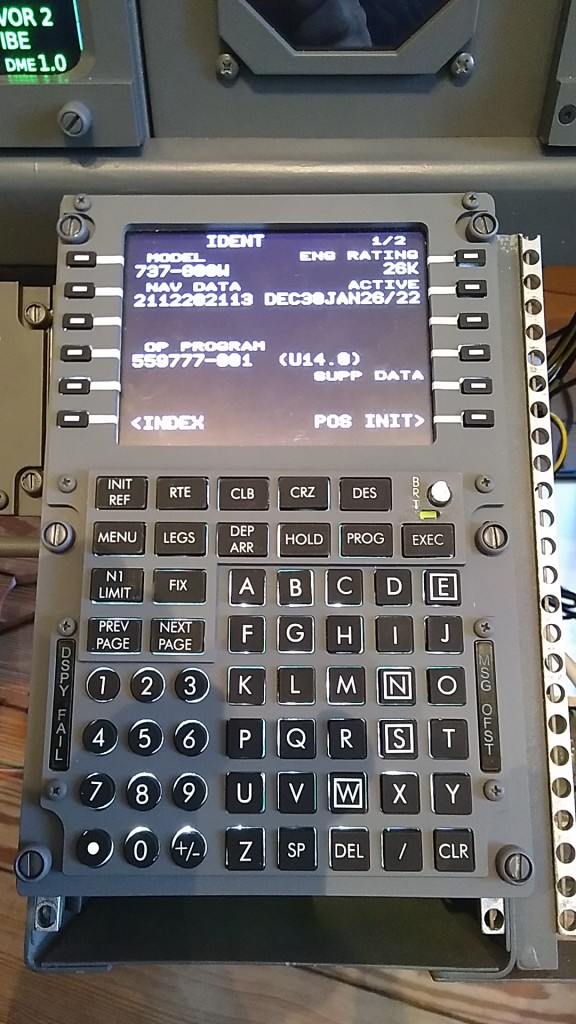
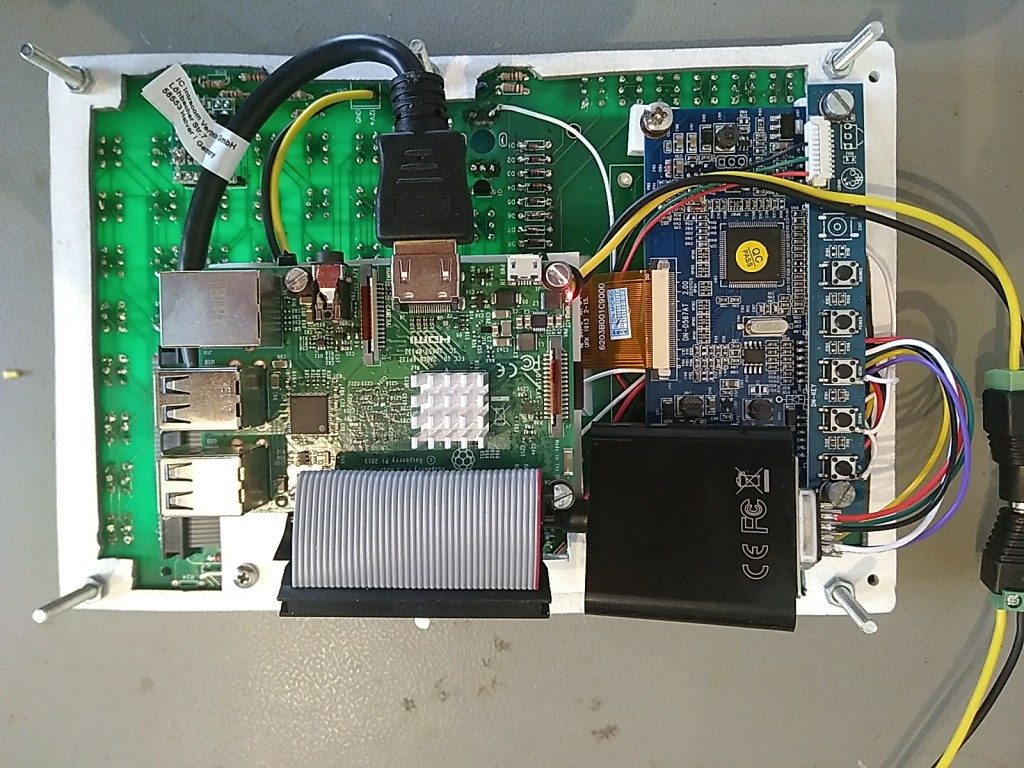
Thanks to my colleague Piki from northern Germany and thanks to Dotsha747’s open source FMC PCB and hardware guidance I have been able to complete the first Flight Management Computer (FMC).
It uses a Rasperry Pi 3B instead of the Rasperry Pi Zero recommended by Dotsha747 since I want to use a wired LAN connection throughout the cockpit instead of WLAN. The Rasperry Pi 3B has more computing power and is further able to operate X11 and my custom OpenGC version very elegantly. The lightplates and keycaps are from OpenCockpits. They fit almost perfectly to the PCB of Dotsha747. The only problem was the EXEC light which I had to drill manually into the lightplate.
The 5″ screen comes with a VGA display driver is connected via a VGA-to-HDMI adapter to the Rasperry Pi and the keys are backlighted. The unit now only needs a 12V power supply (and if chosen) a LAN network cable. No more wiring puzzle in the cockpit, which will be especially helpful in the hardly accessible MIP.
One change was done compared to the Dotsha747 hardware: the encoder to tune the display brightness was connected to the display driver board as follows: Encoder Button is connected directly to display driver button “Menu”. Encoder signals are sent to Rasperry Pi and transformed to Up&Down pulses driving the display driver buttons “Up” and “Down” via the transistors Q2 and Q3 (DSPY and FAIL LED’s which are not supported by ZIBO anyway. Please watch out for R24 and R25 which I had to switch on my PCB Version 3.3.
PLEASE MAKE SURE THAT YOU CONNECT PIN 1 of the FMC PCB to PIN 1 OF THE RASPERRY PI.
This is straight forward with the rasperry pi zero which can be directly plugged into the connector of the FMC PCB without a cable. But you have to turn around the whole pin assignment by use of a female to female 40 pin connector if you mount the rasperry pi 3b over a flat wire cable. (I have burned a rasperry pi by this mistake, please be careful).
Our open source software package xpcockpit was extended by a Rasperry Pi module called xppi (Many thanks Piki for your edits!) and we also have adapted the OpenGC module Boeing737FMC for more performance and with an option to simply display the FMC screen without the keys.