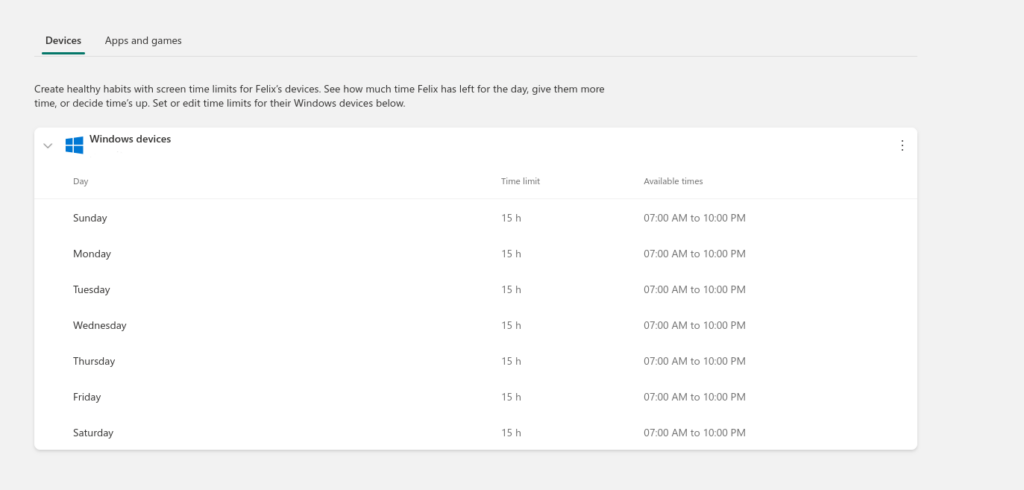
Like many parents we use Microsoft Family Safety to limit screen time of our children. It turns out that the default screen time is …
15 HOURS PER DAY !!!!!
So when you register a Microsoft device (e.g. Windows computer or Xbox) for your 9 year old, the default screen time for your 9 year old is 15 hours. Actually, the default setting is: no control of screen time. Isn’t this hilarious?
Dear Microsoft, it is very nice that you have an App to limit screen time of our children. It is possibly a fact that many parents are overwhelmed with managing the opportunities and threats of today’s technology together with their kids and will not apply screen time at all.
However, wouldn’t it be a service to those parents who care about the health of their children to start with a default screen time of 1 hour upon registration?
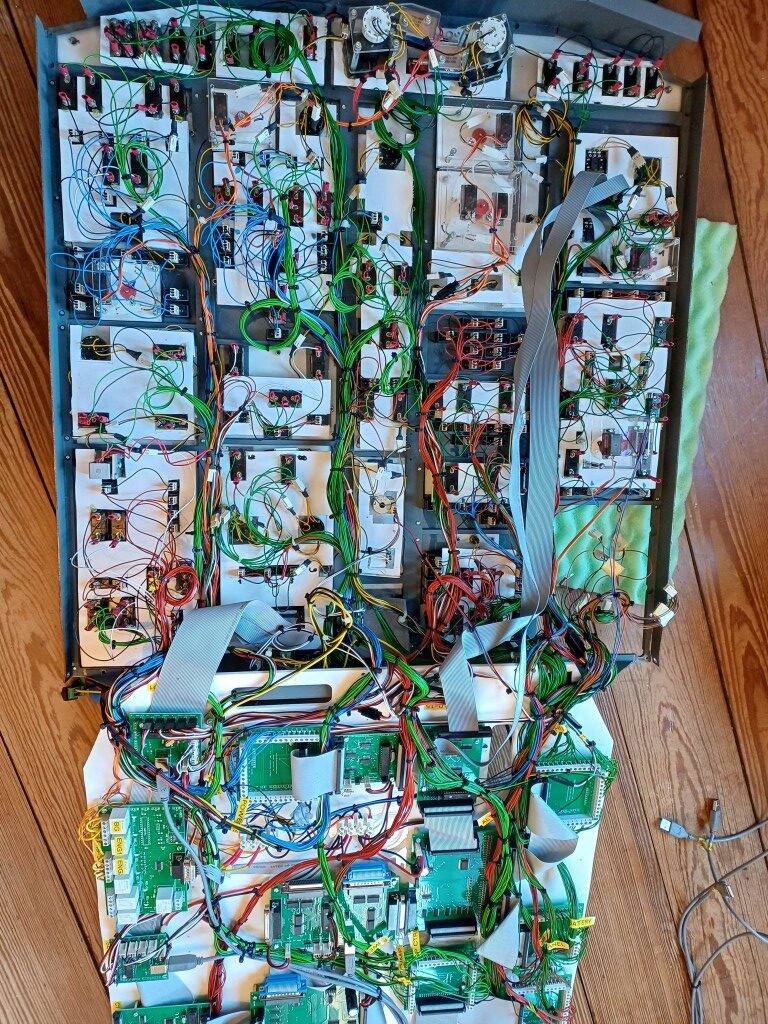
I’ve just removed and replaced the last OpenCockpits Hardware, the Forward Overhead Panel, which was connected via USB to the flight simulator. Apart from the extensive wiring needed, USB devices by OpenCockpits were quite difficult to use because a) their communication protocol is not “Open” as the name misleadingly suggests, and b) the OpenCockpits USB devices have no serial number, thus cannot be distinguished from each other. This last point made is rather difficult to run them reliably, since accessing two servo cards (e.g. one driving the fuel temperature servo and the other driving the cabin pressure servo) was always a lottery. We don’t want to fly by luck, anyway.
Here are some pictures of the “old” Forward Overhead Panel. Nicely built, but too much wiring and occupying 3 USB ports. The last image shows all the hardware panels which were needed.
The new world is called “Ethernet” and Teensy and consists of a universal Teensy firmware which listens to the flight simulator and allows to be on-the-fly programmed for any attached inputs / outputs or daughter boards via the I2C bus. The new Forward Overhead Panel has the following hardware structure:
Teensy 4.1 Controller with Ethernet and I2C interface
19 MCP23017 16 Input / Output boards via I2C
2 PCA9685 PWM / Servo Output boards via I2C
2 HT16K33 7 Segment LED boards via I2C
The new Panel also features 4 Solenoid Switches:
Yaw Damper Switch
Engine 1 Start Switch
Engine 2 Start Switch
Wing Ice Switch
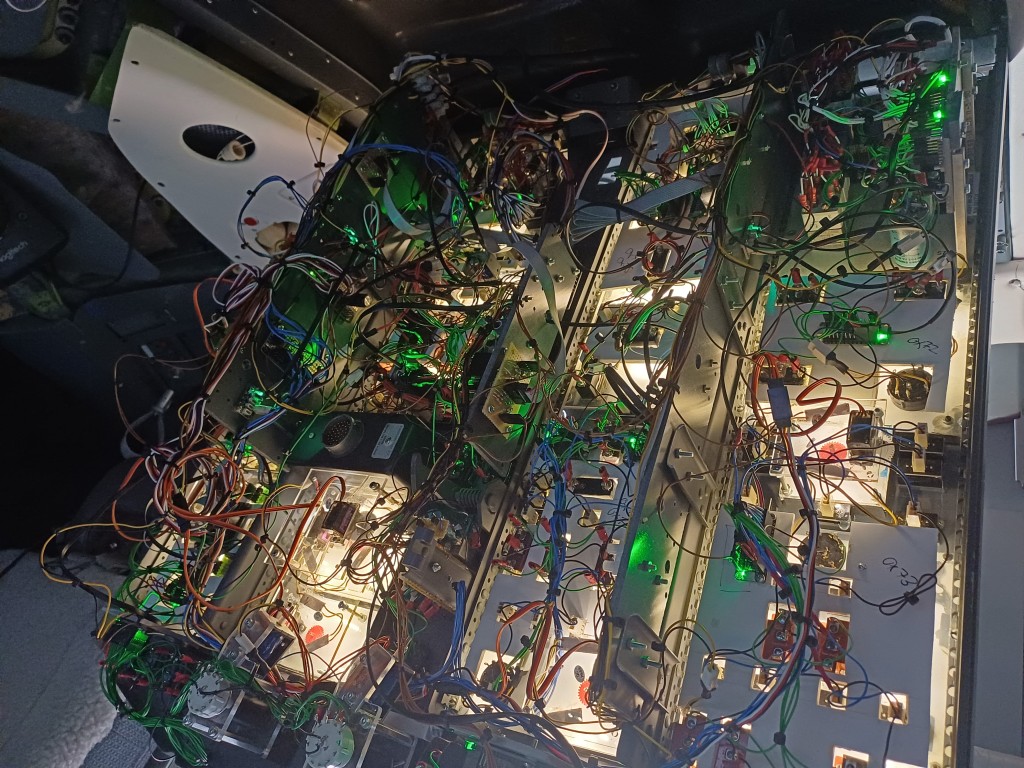
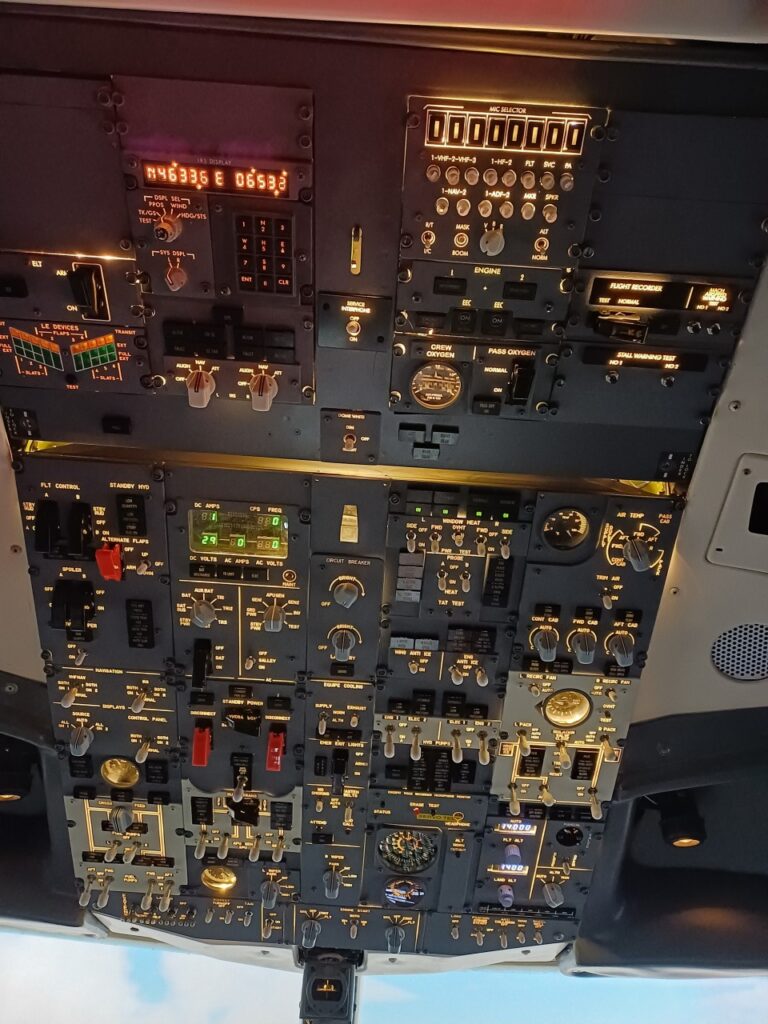
The New Panel also features 16 latched Switches like in the real aircraft and it is mounted on a original B737-300 overhead frame, plus includes three original LED-retrofitted panels and a few original and LED-retrofitted Korry annunciators. Beautiful stuff, see here:
As you can see from the last image, the amount of wiring has not gone to 0. However, each panel can be detached without removing the overhead since each panel only has a 4 wire I2C connector, one Interrupt wire and a 12V backlighting connector. This could be optimized by a generalized panel interface (using e.g. a 6 wire plug).
Flight test is underway, but the new Forward Overhead Panel looks stable so far …
Teensy Code as part of the xpcockpits framework available on Github here.
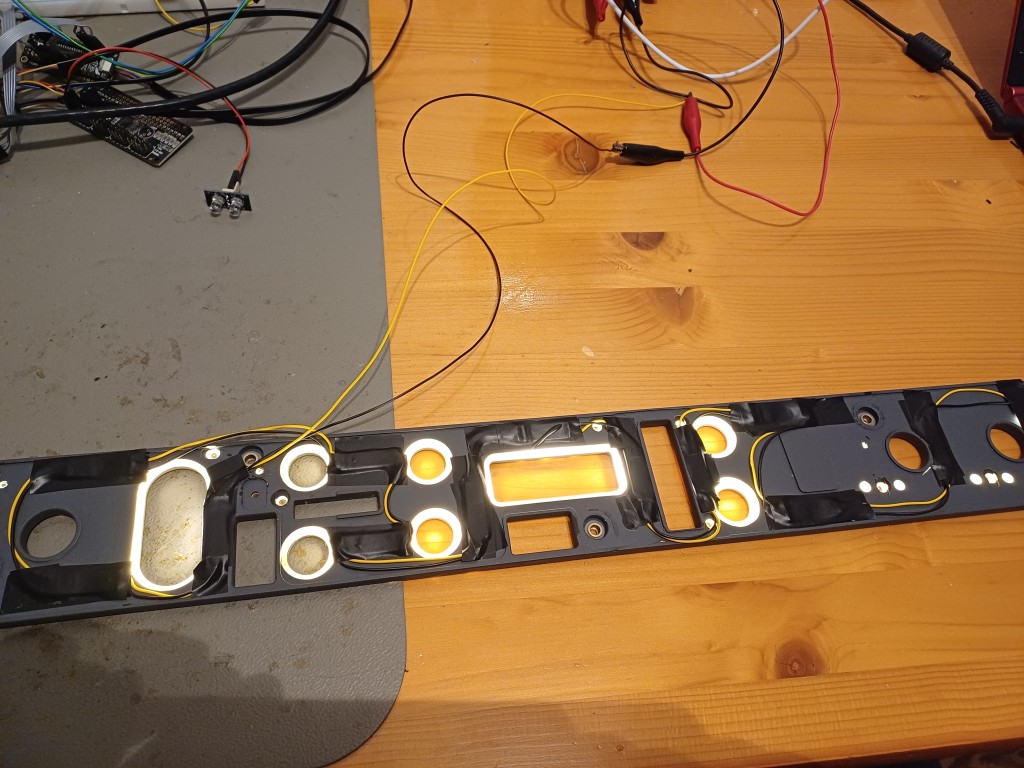
Boeing 737 classic aircraft use cockpit panels which are backlighted by incandescent bulbs. They are driven by 5V (not 28V like all other bulbs, so please don’t burn them, it happened to me). The bulbs are connected in parallel, they are directly soldered onto a PCB and fit through holes into the semi-transparent backplate.
Unfortunately, after 30+ years those incandescent bulbs are not that effective any more and the backlight is rather dim. They also draw quite some power as you can imagine (more than 1A per lightplate).
I have now fitted 12V LED strips (using 120 LED’s per meter) in pairs of 3 LED’s to the lightplate and thus had to drill another two holes per bulb hole:
The result is fascinating. A more even distributed backlighting which is much brighter and is dimmable by a PWM mosfet driver from a common microcontroller PWM capable GPIO output. The current drawn by the lightplate went down from 1 A to 0.2 A:
You can for instance use the Joy-IT COM-MOSFET driver to dim the backlight from software. It accepts 3.3V or 5.0V logic inputs.
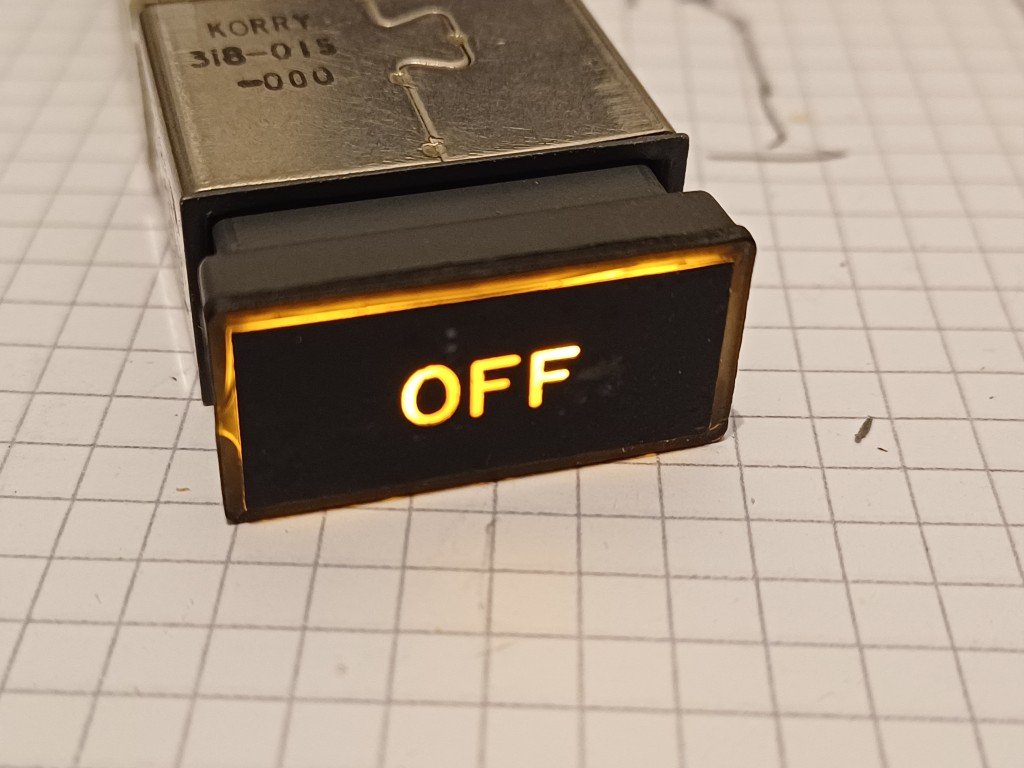
Korry annunciators are used in many larger aircraft. Boeing often uses (or: used, e.g. in the Boeing 737 classic series) the Korry 318 annunciator. It consists of two 28V white light bulbs (Type 387 T1 3/4 Midget Flanged). The annunciator can be pressed, activating a switch to test the annunciator’s light bulbs. The light bulbs can be exchanged easily by pulling the front part of the annunciator from the respective panel … no screw driver needed.
The use of incandescent lamps in annunciator produces a warm light, but 28V is usually not what we use in cockpit building. The annunciator also draws around 80 mA, which is quite a lot.
Flaps-to-Approach has demonstrated how to dissasemble those annunciators and how they work. I will now show how to turn the annuciator into a regular 5V device that you can connect to your GPIO pin of any modern microcontroller.
There are two types of Korry 318 annunciators:
Type 1: ground seeking: common power pin and controlled by ground pin
Type 2: power seeking: common ground pin and controlled by power pin
The first step is to replace the lamps with LED’s. This is possible through the company ledlightbulb.net which offers T 1 3/4 midget flanged bulbs with LED’s instead of incandescent lamps:
Please choose the white color LED with 5V dimmable configuration
For Type 1 Korrys please add in the comment field: “center pin negative”
For Type 2 Korrys please add in the comment field: “center pin positive”
You will get the LED replacements as shown below (left are two inandescent bulbs and right are two LED replacements. Put those LED’s into the Korry annunciator and test the circuit using a 5V power supply.
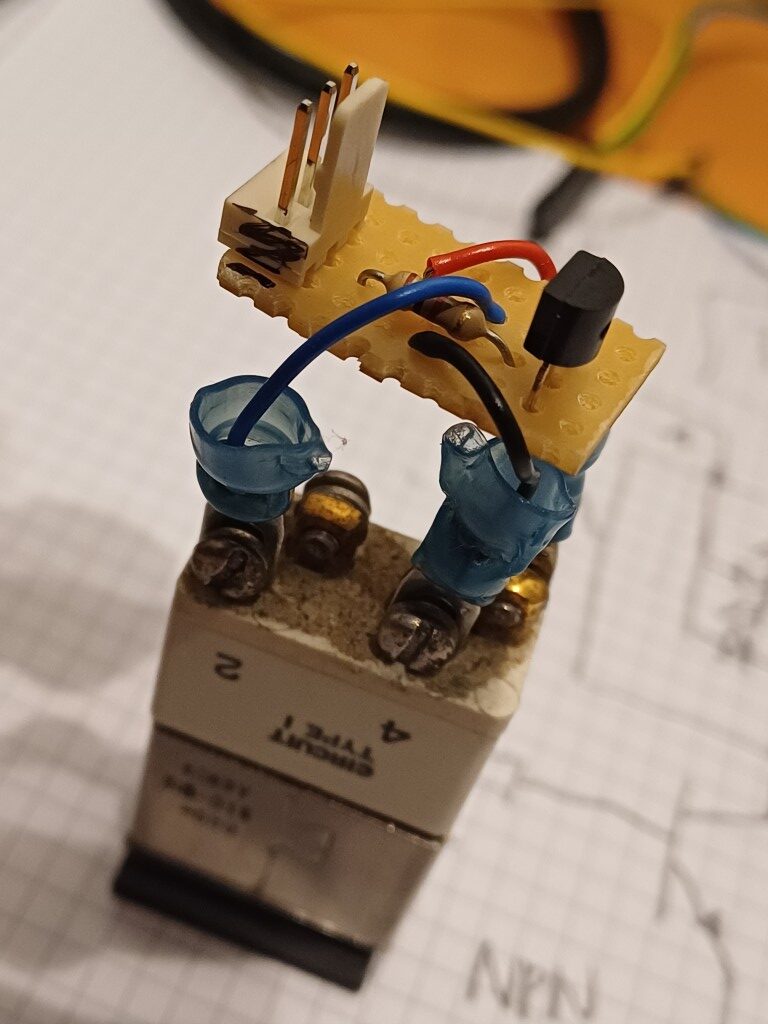
The next task is to build a circuit so that the LED Korry switch can be connected to your microcontroller. The Korry switch LED’s are connected in parallel, require 5V driving power and still draw around 20 mA, which may be too much for your GPIO pin of your microcontroller.
The following schematic is suitable for Type ground seeking Korrys:
The following schematic is suitable for the Type 2 power seeking Korry:
The circuits can be easily put on a small board right next to the Korrys, see here:
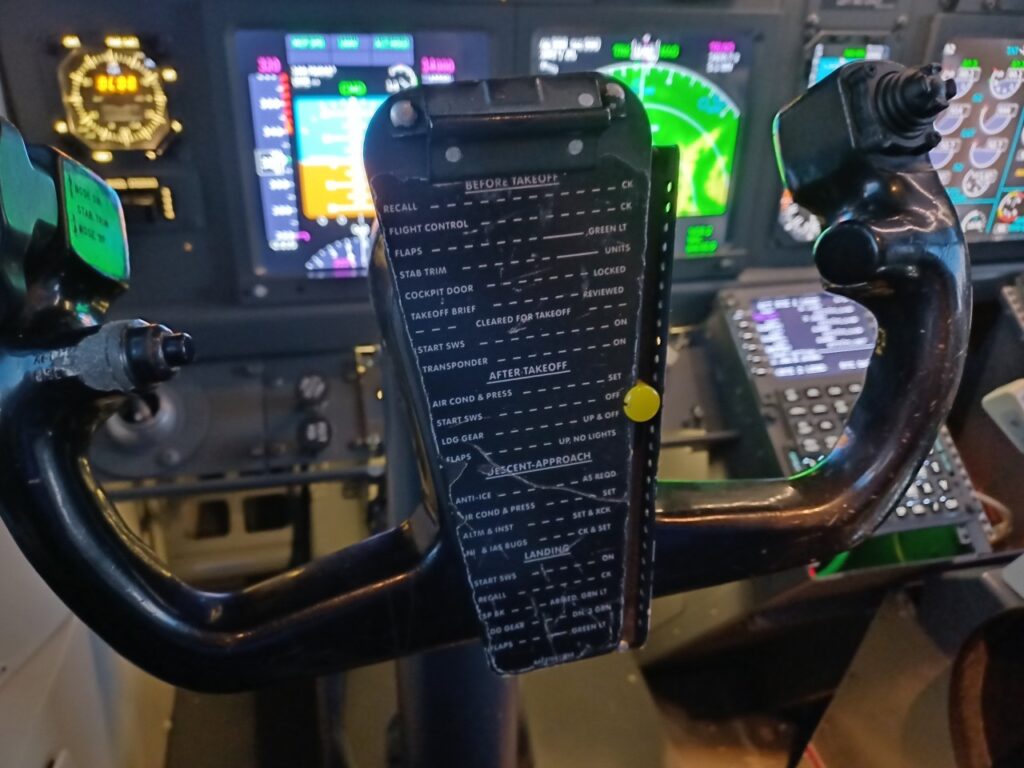
Not many words needed. I’m happy to show you some pictures of my first flight yesterday on 26 March 2024 with the newly rebuilt Flight Simulator Home Cockpit, now featuring a second flight management computer and the newly built aft overhead panel, and, and, and … also many thanks for the VACC (VATSIM Controllers in Switzerland) staff for this greate Geneva to Zurich coverage!
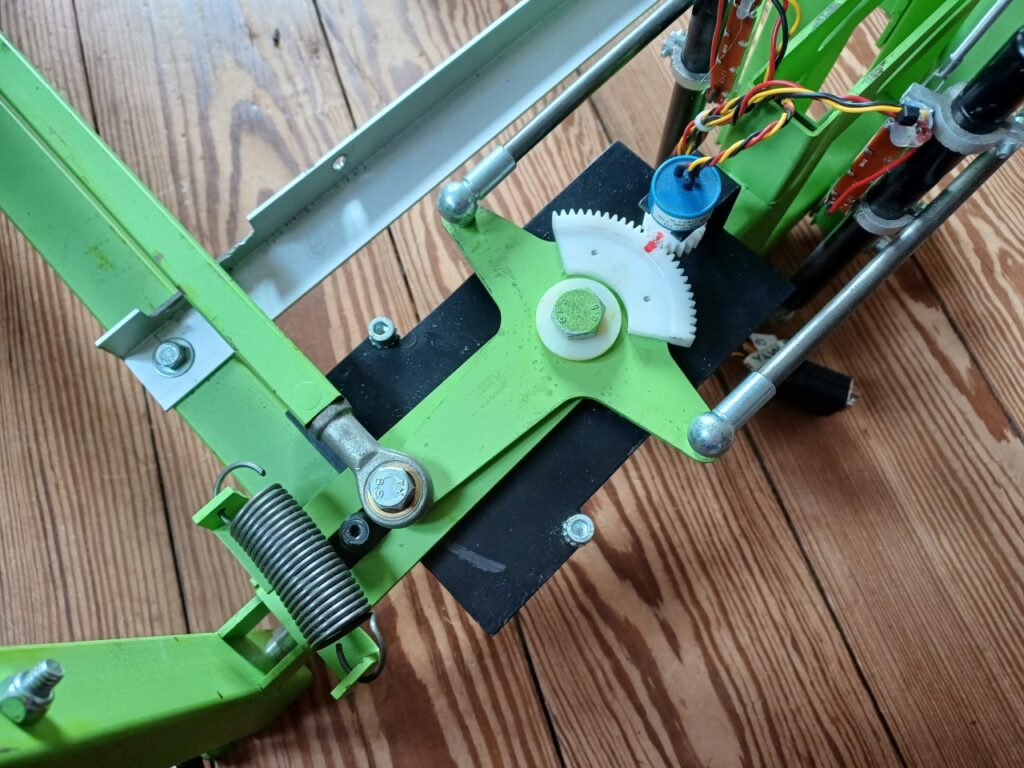
After having almost completely mounted the Sim in a newly built wooden house including a curved 210 degree screen and three projectors, a small metal part of the mechanical rudder pedals broke. Since the B737 sim is mounted in a real cockpit enclosure, there is no way to access the rudder pedal from the front. This meant unmounting the pedestal, throttle quadrant, seats and the main instrument panel MIP first …
The good thing about such an exercise: each time I have to take apart the Cockpit things can be improved and the rebuilding process becomes easier. The broken part was found, but the supplier of this otherwise great dual linked rudder pedal assembly, SimuJabs from Spain, unfortunately went out of business.
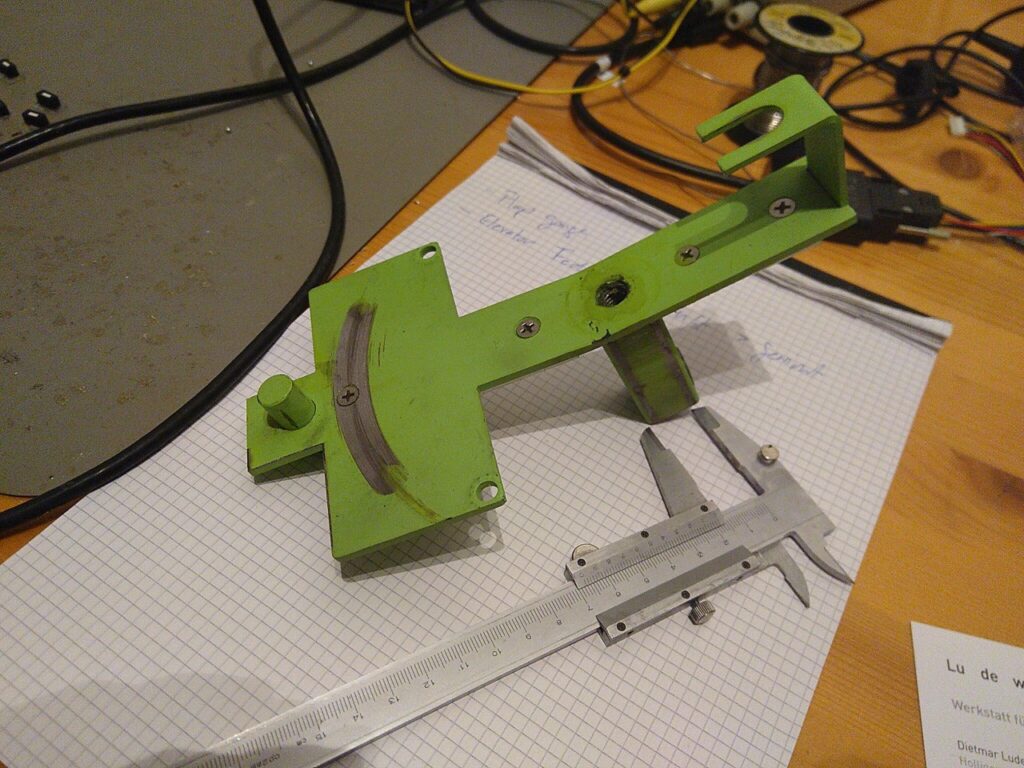
I was very glad to find a nearby wood and metal workshop in 3008 Bern called LU DE WIG, who created a reinforced replica of the broken part in s short time (piece is now painted in black instead of green):
Rebuilding the cockpit (start in front and work your way backwards was a breeze (only around five hours in total):
The whole thing has actually started in 2007 at my bachelor’s party with friends when we buried three rather expensive bottles for 10 years about 1 m deep in a forest in central Switzerland. Guess what: the wine has aged perfectly under really adverse conditions since the bottles were subject to seasonal temperature changes of 10 degrees Celsius or more and were experiencing changes in soil humidity from completely dry to soaked in ground water.
So: What about those who say that wine can only be preserved with constant climatic conditions?
There have been several instances during the last years where either I or a colleague did bury a fine bottle of wine, geo-tagged the site and motivated others to find it. Preferrably on Elba Island. The idea ha ripened for building a geocaching initiative where you can find “wine caches” buried underground. The idea would be that you could get a nice outdoor experience and have a good drink with wine you would have never bought yourself. The rules for such a game would need to be created. The main rule would be that you have to re-dig a wine of your choice once you have emptied a cache. The main problem with this game is that current geo-caching initiatives do not (geocaching.com or opencaching.de) do not allow to hide alcoholic beverages since they are open for everybody. The project “winedigger” (let’s call it this way for the moment, there is no such website to date) would therefore have to be an adults-only (18+ year old) game.
Please get back to me if you would want to take the initiative and start the project.
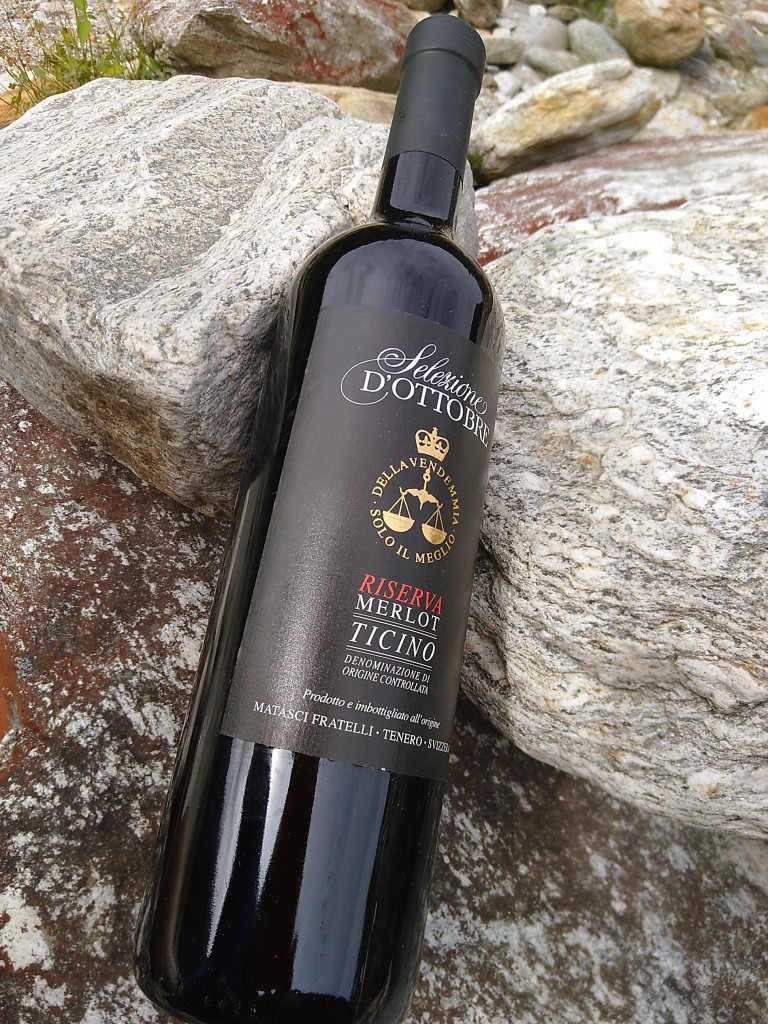
Wine-Cache No. 1: Verzasca Valley Switzerland
Located in the beautiful Verzasca Valley in southern Switzerland, this typical (but not most expensive) Merlot grape wine was buried by me on 8 August 2023.
46.346050 °N, 8.791470 °E 897 m.asl. (Precision: 3-5 m)
Here are some pictures for you to guess what to expect. Note that the bottle is located in around 70-80 cm depth and you may have trouble to get to the place in spring during snow melt and after heavy showers. You need a shovel to dig since you may be off by 1-2 m.
In case you get lost, here follow two pictures of larger stone formations in the vicinity. Actually, the bottle is located just in the middle of those two stone formations …
Wine-Cache No. 2: Elba Island, Italy
If you ever visit Elba, don’t miss out the southern part of Lacona. It offers fine food, beaches without big buildings in your back and … a wine cache. Also don’t miss out the restaurant Bagni Orano. You can enjoy fine fish dishes while massaging your feet in the sand.
42.759740 °N, 10.307220 °E 2 m.asl. (Precision: 3 m)
We also have included a few kid’s toys. But be aware: the cache is burried around 1 m deep in the sand. You will need a good shovel (an avalanche shovel is a helpful tool for sand digging) and you may need to get rid of daytime spectators before digging. Sunset or sunrise is a good time for wine cache digging. If you need a hint: the sixt pole shall it be and not more than 9 steps you shall walk towards the sea.
Wine-Cache No. 3: Pfynwald Wallis in Switzerland
The Salgesch Village in the Canton Wallis in Switzerland is known for its superb wines. If you ever happen to be there, please don’t miss out the Gregor Kuonen Wine Cellar for tasting a few of the finest wines of southern Switzerland. A few km south of Salgesch on the southern side of the Rhone river lies the Pfynwald nature reserve. I have burried a fine bottle of Gregor Kuonen red wine for you. Notably not in the nature reserve itself but in a agriculturally used grazing field just at the border to the forest. Depth is only around 20 cm. Have fun!
46.298690 °N, 7.583840 °E 560 m.asl. (Precision: 3-5 m)
Good luck with finding! And please let me know if you have replaced it with a bottle of your choice. And even more importantly, please leave me a note on the wine tasting ceremony!
I wanted to rotate the cockpit shell horizontally by 90 degrees (you may have read the article where we already had rotated it by 90 degrees vertically). The thing weighs around 600 kg and wheels are not an option when rotating in a circle.
The idea was: build skis of wooden plates and use frying butter to lubricate and get around static friction of the wood plates. I had no idea if it would work. This was simply a cheap try. The expensive solution would have been to rent a crane (been there done that, see here).
Fortunately it worked out thanks to the help of my neighbors (no names here in this public blog, but many many thanks again for their force and help!). Using frying butter it rotated with medium force needed … like on butter!
Take 1 (Turning)
Take 2 (Moving)
And … in order to build a house around the cockpit to fit the projectors and screens in a waterproof environment, the whole cockpit was moved away from the platform today … many thanks to the whole family for helping!
The journey has just begun, or as we say in german: Der Weg ist das Ziel. After adapting the nicely made upper part of the Boeing 737-800 MIP from SISMO Soluciones to the original Boeing 737-300 MIP stand below (see this post), the next task was to outfit the whole thing with proper electronics.
I have started with the MIP LCD displays and the FMC’s. Most cockpit builders use regular monitors and connect them to multiple regular PC’s. There are two uncessary parts in such a setup:
Monitor Case: There is no need for it as the monitors sit behind the MIP case anyway. The original monitor case further creates an artificial distance between the MIP glass and the monitor itself. It would be good to have the displayed content as close to the front of the MIP itself to avoid shading effects when viewed from the side.
One PC per Flight Display: There is no need for so many PC’s since the flight displays require a minimum amount of CPU/GPU power. They do not display 3D content. They however need to react in real time to the simulated contect. A delay of 100 milliseconds between aircraft movement and the reaction of the artificial horizon would be very hard to fly. So a 25-50 frames-per-second update frequency of the primary flight display and a maximum of 10-20 millisecond delay would be a good target.
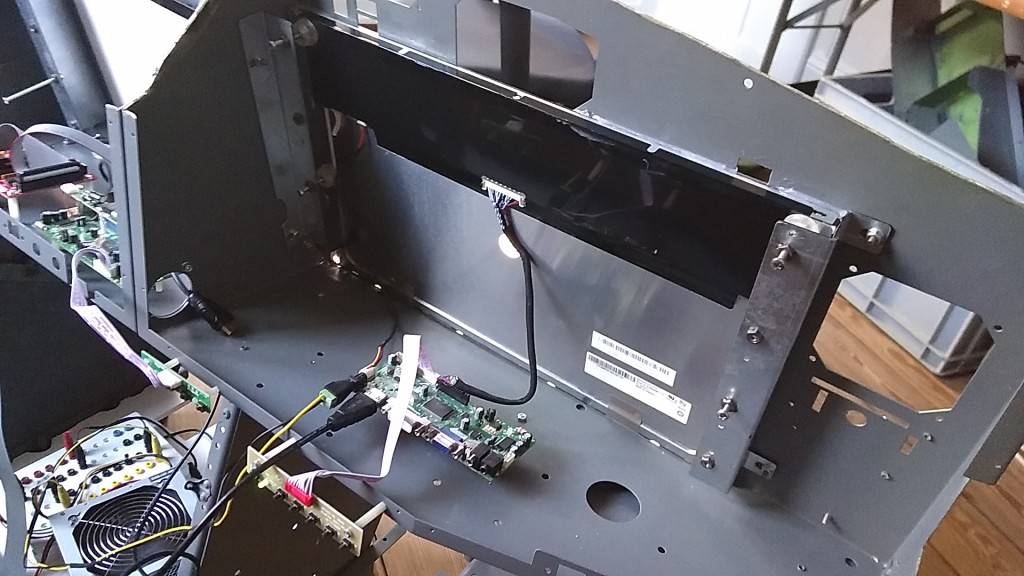
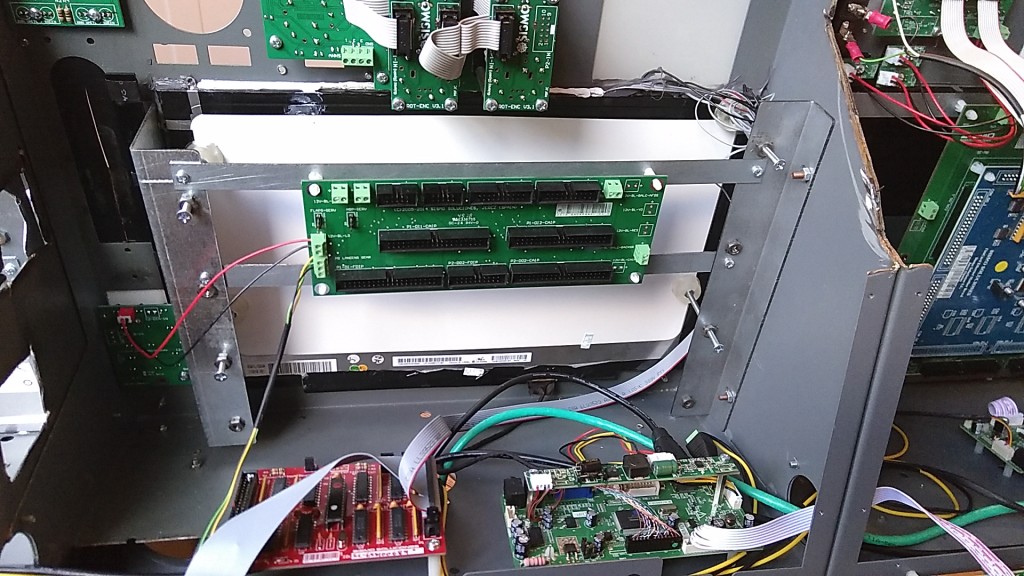
The solution was to buy monitor screens and HDMI driver boards instead of the full monitor. With the variety of sellers on Ali Express this becomes rather simple. I’ve chosen the following models:
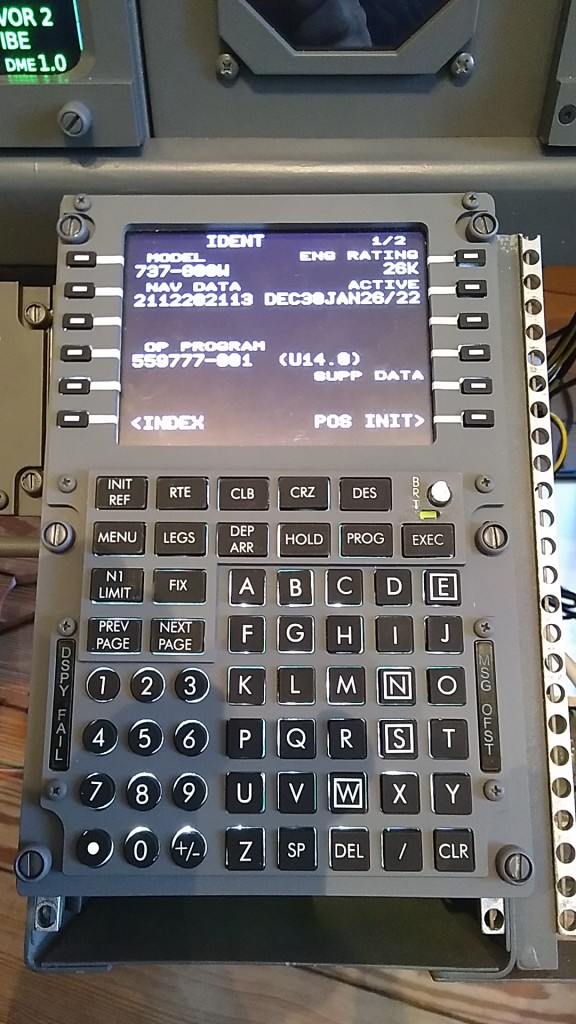
Captain and First Officer CDU: 1920×1080 18.5″ G185HAN01 and the HDMI driver board M.NT68676
EICAS CDU: 1680×1050 15.4″ LP154WE3-TLB2 and the HDMI driver board M.NT68676 (please select correct display model for its firmware and cables to match)
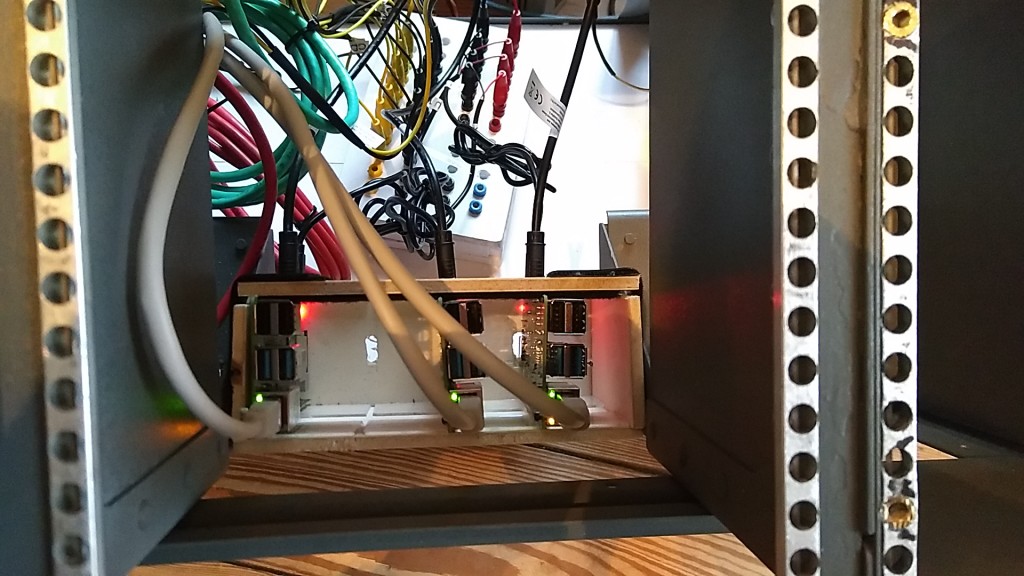
For each of those displays I’ve selected a Rasperry PI (3B for FMC or 4B for the CDU’s) which runs XPOpenGC. First tests showed a very good performance within above specs. Rasperry PI’s use little power, are cheap, can be administered remotely and can be easily stowed in the center part of the MIP base.
You may find the following images helpful in case you build your own cockpit:
The Captain Side CDU: the monitor nicely fits close to the MIP case. You can also see the HDMI driver board and the monitor control buttons, which I have put to the back of the MIP, just in case I need them during operation.First Officer side CDU. Same Procedure.EICAS CDU was a bit more difficult. Due to the size and lightness of the monitor, it is a laptop screen, It needs to be handled with care. I also glued the top and left hand side in order to avoid stray light entry, especially from the gear annunciator and the EDC above. You also see the ISFD wires which had to fit the monitor mount.The quality of the Full HD MIP displays is quite astonishing. You also see a fully functional WXR display.Here you see all three monitors and one FMC in operation. The second FMC will be built once the MIP has proven to be free of bugs.The three Rasperry PI 4B minicomputers in the center lower CDU bay. The lower CDU will possibly never be built since the B737-300 does not have space for it.